小米足式机器人的专利曝光揭示了该公司在机器人技术领域的最新进展,这款足式机器人采用了前后双弹簧设计,这种设计不仅提高了机器人的稳定性和适应性,还增强了其在复杂地形中的移动能力,以下是对这款应用软件的详细介绍。
技术背景与创新点
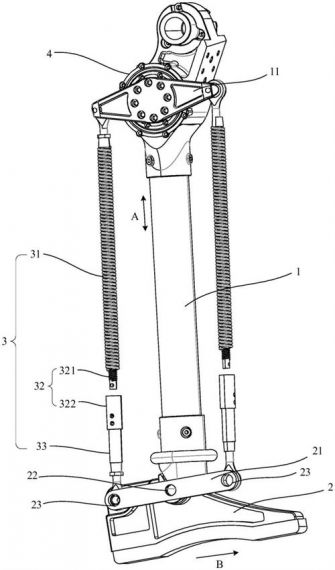
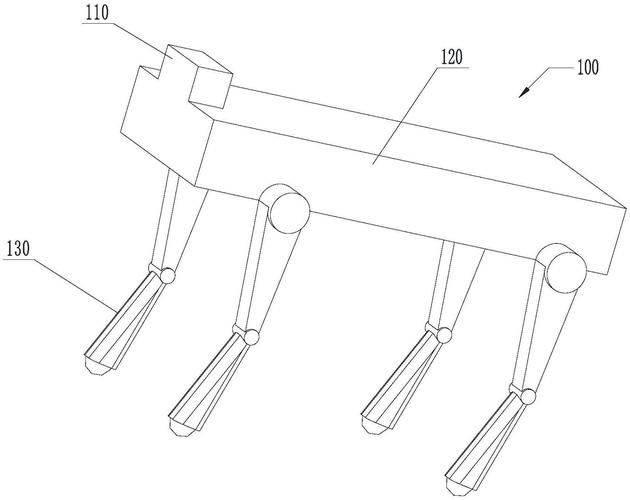
足式机器人是一种模仿人类或动物行走方式的机器人,它们通常具有多个关节和传感器,能够在不同的地形上自主行走,传统的足式机器人在稳定性和适应性方面存在一定的局限性,尤其是在复杂地形中的表现不尽如人意,为了解决这一问题,小米公司在其最新的足式机器人中引入了前后双弹簧设计。
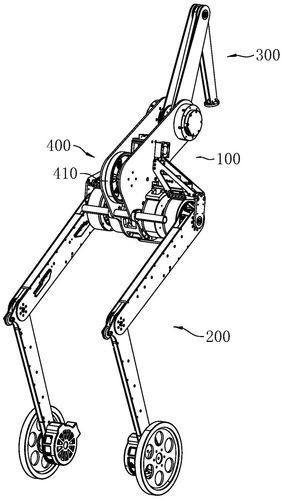
前后双弹簧设计是这款足式机器人的核心创新点之一,通过在机器人的前后部分分别安装弹簧,可以有效地吸收地面冲击,提高机器人的稳定性和适应性,这种设计还能够增强机器人的越障能力,使其能够在更加崎岖的地形中自如行走。
应用软件功能介绍
1、自主导航系统:应用软件内置了先进的自主导航系统,能够实时感知周围环境并规划最优路径,通过集成高精度的GPS模块和多种传感器,机器人能够准确地定位自身位置,并避开障碍物,实现自主行走。
2、智能避障功能:利用激光雷达、超声波等传感器,机器人能够实时检测前方障碍物的距离和形状,并通过算法计算出最优的避障路径,在遇到复杂地形时,机器人能够自动调整步态,确保稳定行走。
3、远程控制与监控:用户可以通过手机APP或电脑软件远程控制机器人的行动,应用软件还提供了实时监控功能,用户可以随时随地查看机器人的位置、状态等信息。
4、任务执行与反馈:机器人可以根据预设的任务指令执行各种操作,如搬运物品、探测环境等,完成任务后,机器人会通过应用软件向用户反馈任务执行情况,方便用户进行后续处理。
5、自适应步态调整:根据不同的地形和行走条件,机器人能够自动调整步态,以保持最佳的行走效率和稳定性,这一功能得益于前后双弹簧设计的引入,使得机器人在复杂地形中的表现更加出色。
6、电池管理与续航优化:应用软件还具备电池管理功能,能够实时监测电池电量并优化续航时间,当电池电量低时,机器人会自动返回充电站进行充电,确保长时间稳定运行。
应用场景与前景展望
小米足式机器人凭借其前后双弹簧设计和先进的应用软件功能,在多个领域具有广泛的应用前景,在工业领域,它可以用于自动化生产线上的物料搬运、设备巡检等任务;在农业领域,它可以用于农田监测、作物收割等作业;在医疗领域,它可以用于医院内部的药品配送、病人护理等工作,随着技术的不断进步和应用场景的拓展,小米足式机器人有望在未来发挥更加重要的作用。
小米足式机器人的专利曝光展示了该公司在机器人技术领域的创新实力和应用潜力,通过前后双弹簧设计和先进的应用软件功能,这款足式机器人在稳定性、适应性和越障能力等方面表现出色,为未来的机器人技术发展提供了新的思路和方向。


